引言
上一篇数据结构与算法 --- 排序算法(二)中,介绍了分治算法思想及借助分治算法思想实现的归并排序。
本篇来讲解一下快速排序,它也是借助分治算法思想实现,但其处理思路与归并排序完全不一样。
快速排序
来看一下快速排序的算法原理:.
算法图解
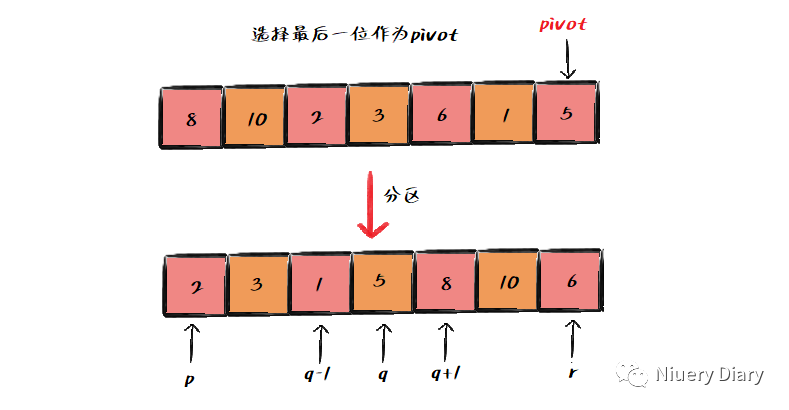
如果要排序数组中 p 到 r 的数据,那么,我们选择 p 到 r 之间的任意一个数据作为 pivot(分区点),然后遍历从 p 到 r 的数据,将小于 pivot 的放到左边,将大于或等于 pivot 的放右边,将 pivot 放中间,经过这一步骤处理之后,从 p 到 r 的数据就被分成了3部分。
假设 pivot 现在的位置下标是 q,那么从 p 到 q-1 的数据都小于 pivot,中间是 pivot,从q+1 到 r 都是大于 pivot,如下图:
根据分治的处理思想,分区完成之后,开始递归下标从 p 到 q-1 的数据和下标 q+1 到 r 的数据,知道待排序区间的大小缩小为1,就说明数据都有序了。
如果使用递推公式将上面的过程表示出来,递推公式:
终止条件:

终止条件:p >= r
其中 partition() 分区函数要做的就是随机选择一个元素作为 pivot(一般选择 p到r区间中的最后一个元素),然后基于 pivot 对区间 Arr[p,r] 进行分区,分区函数返回分区之后的 pivot 的下标。
使用c#代码实现如下:
classQuickSort
{
public static void Sort(int[] arr)
{
if (arr == null || arr.Length == 0)
return;
QuickSortRecursive(arr, 0, arr.Length - 1);
}
private static void QuickSortRecursive(int[] arr, int left, int right)
{
if (left >= right)
return;
int pivotIndex = Partition(arr, left, right);
QuickSortRecursive(arr, left, pivotIndex - 1);
QuickSortRecursive(arr, pivotIndex + 1, right);
}
private static int Partition(int[] arr, int left, int right)
{
//这里可以选择不同的策略,比如随机数选取或选择中间值
int pivotIndex = ChoosePivot(left, right);
int pivotValue = arr[pivotIndex];
Swap(arr, pivotIndex, right);
int currentIndex = left;
for (int i = left; i < right; i++)
{
if (arr[i] < pivotValue)
{
Swap(arr, i, currentIndex);
currentIndex++;
}
}
Swap(arr, currentIndex, right);
return currentIndex;
}
private static int ChoosePivot(int left, int right)
{
//这里选择使用中间值
return (left + right) / 2;
}
private static void Swap(int[] arr, int i, int j)
{
int temp = arr[i];
arr[i] = arr[j];
arr[j] = temp;
}
}
算法分析
「内存消耗」:
如果不考虑空间消耗的话,那么 partition() 分区函数实现非常简单,直接申请两个临时数组 X 和 Y,遍历目标区间 Arr[p,r] ,小于 pivot 的直接复制到X,大于pivot的直接复制到Y,最后按顺序将X,pivot,Y依次复制到目标区间 Arr[p,r]。
但是,如果这样实现的话, partition() 执行的过程中将消耗很多额外内存空间,快速排序也就不是原地排序算法了,如果希望快速排序是原地排序算法,该怎么做呢?
这就需要之前文章中提到的「通过交换来避免搬移」, 具体实现类似选择排序,通过游标 i 把Arr[p,r-1] 分成两个部分,Arr[p,i-1] 的元素都小于 pivot (也就是Arr[r]),暂且称之为“已处理区间”,对应的,Arr[i,r-1] 是“未处理区间”。每次从未处理区间 Arr[i,r-1] 中取出一个元素Arr[j] 与 pivot 对比,如果小于 pivot,则将其插入到已处理区间的尾部,也就是下标为 i 的位置。具体图解可以参考数据结构与算法 --- 排序算法(一)中的选择排序算法图解。
「稳定性」:
理解完了快速排序是原地排序算法,那么分析一下该排序算法是否稳定排序?
其实也很简单,排序算法涉及到了分区,分区的操作实现又是按照选择排序原理实现,选择排序本身就是不稳定排序算法,所以快速排序也是不稳定排序。
「时间复杂度」:
-
最好情况时间复杂度:O(nlogn)
在最好的情况下,快速排序的时间复杂度为 O(nlogn)。这种情况发生在每次划分时,待排序数组恰好被平均地分成两个大小相近的子数组。此时,快速排序的递归树的深度较小,每一层的时间复杂度为 O(n),总的时间复杂度为 O(nlogn)。
-
最坏情况时间复杂度:O(n2)
在最坏的情况下,快速排序的时间复杂度为 O(n2)。这种情况发生在每次划分时,待排序数组中的元素都被划分到了同一侧,导致一侧的子数组非常大,另一侧为空。这样就会导致快速排序的递归树非常不平衡,每一层的时间复杂度为 O(n),而递归的层数为n,因此总的时间复杂度为 O(n2)。
-
平均情况时间复杂度:O(nlogn)
在平均情况下,快速排序的时间复杂度为 O(nlogn)。快速排序采用分治策略,在平均情况下,待排序数组会被平均地划分成两个大小相近的子数组,这样递归树会相对平衡,每一层的时间复杂度为 O(nlogn),总的时间复杂度为 O(nlogn)。
总结
需要注意的是,快速排序的性能高度依赖于划分元素的选择。在实际实现中,通常会采取一些优化措施,如三数取中法或随机选取划分元素,以尽量避免最坏情况的发生。总体来说,快速排序在大多数情况下表现良好,因为平均时间复杂度为O(nlogn),它是一种快速且高效的排序算法。
